|
Diese Seite hat das Ziel, den Bau einnes Quadrocopters auf Arduino-Basis mit dem Flugcontroller CRIUS MultiWii und der
Software MultiWii zu dokumentieren. Schaut man im Netz nach, so gibt es unzählige Seiten, die den Bau eines derartigen Quadrocopters zum Inhalt haben. Daneben gibt es etliche Foren, die mehr oder weniger gute Hilfestellungen geben. Auf den meisten äußern sich Besserwisser, deren Beiträge eher zur Verwirrung beitragen als das sie helfen. Allein die Frage nach der Feststellung bzgl. der Propellerdrehrichtung ist eher Comedy als wirkliche Hilfe. |
Da wird diskutiert ob man von oben
auf den Copter schaut oder von unten oder aus Sicht des Motors. Dabei gilt die Vereinbarung,
von oben auf den Copter zu schauen. Auch die angebotenen Anleitungen bieten an vielen Stellen keine wirkliche Hilfe. So ist z.B. die Darstellung der Verkabelung des Flugcontrolers mit dem Empfänger vielfach nicht wirklich gelungen. Eine Schaltskizze wäre hier sinnvoll. Es gibt aber auch Seiten, die äußerst hilfreich sind. |
 |
 |
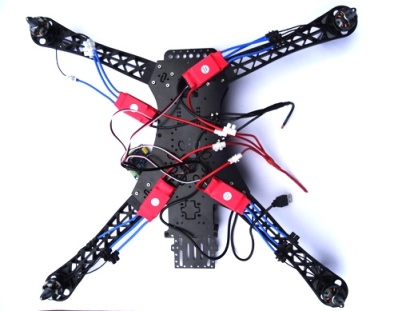 |
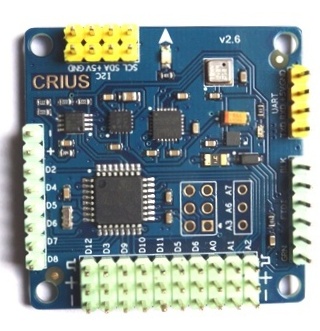
Die Teileliste: 1. Quadrocopter-Frame - Frame X520D SS - 23,35 Euro Durchmesser: 52 cm diagonal, XXL-Modellbau 2. CRIUS MultiWii - Flugcontroler 34 Euro 3. 4 x ESC (= Electronic Speed Controller) SODIAL(R)4Pcs Simonk 20AMP 20A SimonK 16,51 Euro 4. 4 x Brushless-Motoren LHI 2CW 2CCW MT2204 II 2300 V Brushless Motor 4 x - 36 Euro 5. Funkanlage FlySky FS-I6 2.4G 6-Kanal Fernbedienung System FS i6 2.4g 6ch Sender mit FS-iA6 Empfänger für RC 51,99 Euro 6. LiPo - Akku (= Lithium Polymer) - 3 Zellen Gens ace LiPo Akku Pack 2200mAh 11.1V 25C 3S 15,99 Euro 7. Ladegerät für LiPo-Akku SKYRC e Serie Balance Compact Charger Intteligente Lipo Akku Ladegerät für RC Akku 16,99 Euro 8. 4 x Propeller SODIAL(R) 2 Paar 6045 6 * 4,5 Kohlefaser Propeller CW / CCW 4x - 5,58 Euro |
|
Brushless-Motoren Die Motoren werden paarweise gegenüberliegend angebracht. Man muss dabei darauf achten, dass die gegenüberliegenden Motoren die gleiche Drehrichtung haben. Dies erkennt man an der Befestigungsschraube für den Propeller: Rechtsgewinde -> CW (Clockwise) -> im Uhrzeigersinn Linksgewinde -> CCW (Contra Clockwise) -> gegen den Uhrzeigersinn |
Die Verkabelung Als erstes habe ich die mitgelieferten Stecker an den diversen elektrischen Teilen entfernt (Motoren, ESC, Akku) und durch Lüsterklemmen ersetzt. |
|
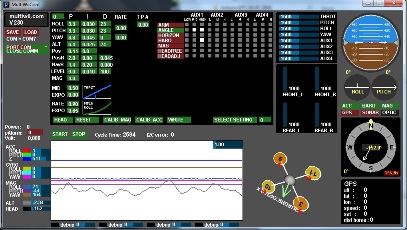
Für die Einstellung der Werte für die Flugsteuerung benötigt man MultiWii. Mittlerweile gibt es die Version 2.4. In Beiträgen im Internet rät man zum Download der Version 2.3, da diese stabil laufen soll. Den Download erreicht man unter folgender Adresse Zum Download MultiWii Die heruntergeladene Datei MultiWii_2_3.zip (ca. 10 MB) wird entzipped und man erhält zwei Unterverzeichnisse: 1. MultiWii und 2. MultiWiiConf |
 |